Adam Matrab
Engineering Portfolio
About Me
I'm a mechanical engineering graduate of Cornell University interested in full time aerospace and mechanical engineering opportunities. I have experience in aerospace systems development including mission conception, system design, analysis, testing, integration, fabrication, and verification. My experience also includes proficiency in MATLAB, Python, ANSYS FEA, LabView, Solidworks, and Autodesk software packages as well as 7 years of experience fabricating components in a machine shop. I previously worked on research and development of electric propulsion systems at The Aerospace Corporation. I'm also a mechanical subteam member of the Cornell Lunar CubeSat research project as part of the NASA CubeQuest Challenge. As a drive systems member of Cornell Mars Rover I competed yearly in the University Rover Challenge developing a semi autonomous rover for exploration at the Mars Desert Research Station, Utah.

The Aerospace Corporation
Working as a propulsion sciences intern, I researched magnetic field topology of ion thrusters in addition to designing, testing, and analyzing a magnetically levitated thrust stand for sensitive thrust measurements under large thermal loads. Conventional thrust stands struggle to record the low thrust (~100mN) of electric propulsion systems without thermal noise from high temperature plasma distorting results. During mag-lev thrust stand tests, I used my MATLAB, LabView, and electronics skills to amplify sensor data while increasing PID control accuracy. I had also the opportunity to work on experimental design and testing utilizing a robot arm, gauss meter, sensor suite, and DAQ system to create 3D magnetic field topologies with feature recognition through MATLAB scripts.
Cornell Lunar CubeSat
Winning 1st place in the Nasa CubeQuest ground tournament, the Cornell lunar CubeSat will fly as part of SLS/Orion EM-1 to the moon using a novel electrolysis water propulsion system. As the ACS and structural engineer I designed, analyzed, and tested the CO2 cold gas thruster, main thruster nozzle, and CubeSat structure.
Role: ACS Propulsion Engineer/CubeSat Structure Engineer
Mission: The Cornell Lunar CubeSat utilizes a novel electrolysis propulsion to propel itself from an Orion module near Earth to a stable lunar orbit as part of NASA EM-1.
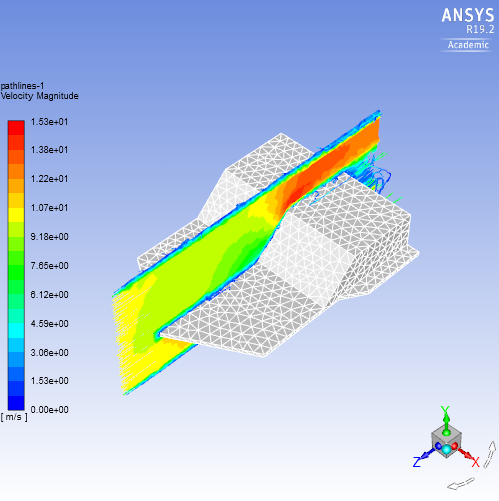
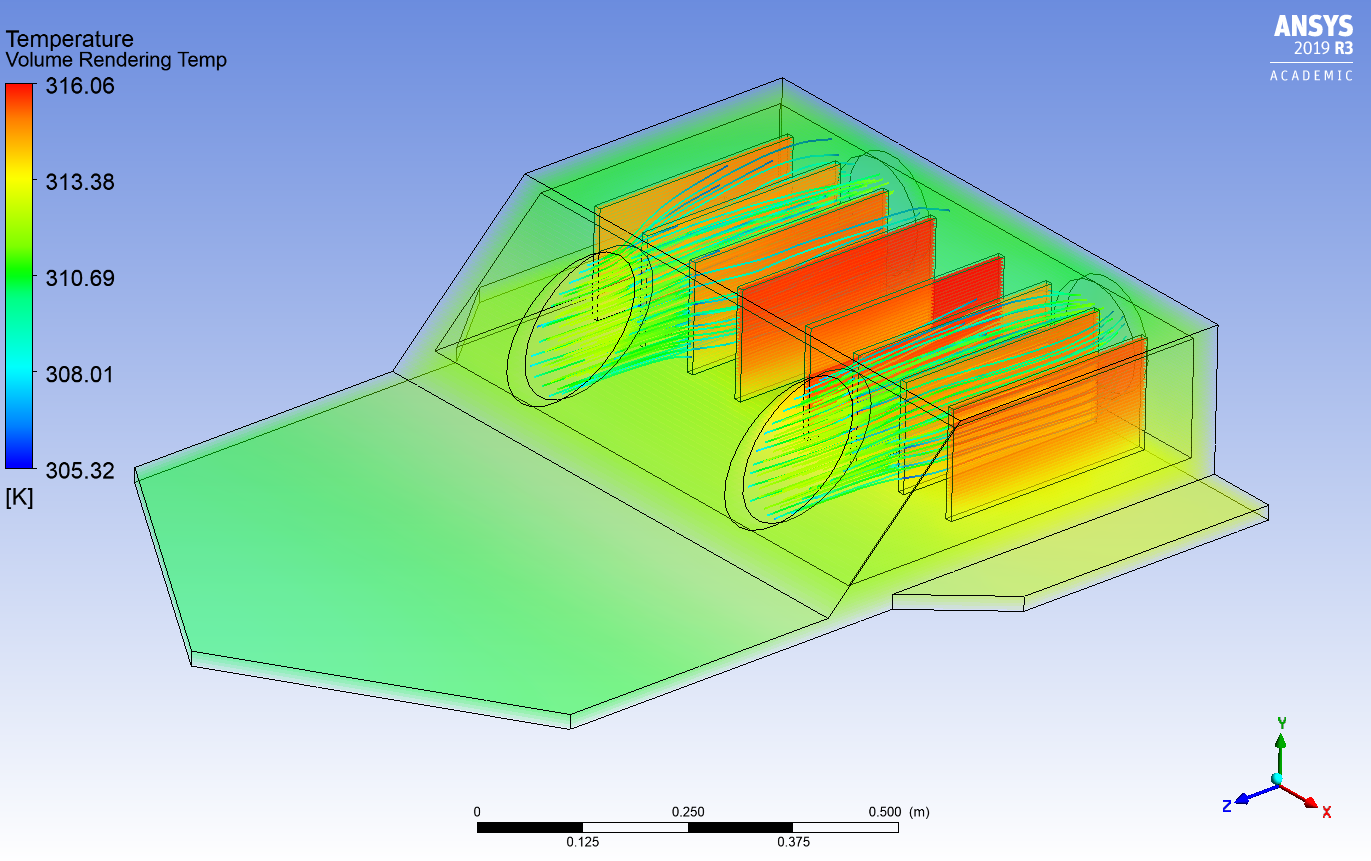
The use of water as a propellant allows for refueling on multiple planets and moons without any chemical processing while the spring deployers provide passive spin stabilization. As a member of the mechanical subteam, I've worked on the design, analysis, optimization, testing, and integration of several key systems including the propulsion, structures, and attitude control system. We've recently won first place in the NASA CubeQuest ground tournament and have secured a spot on the first SLS/Orion exploratory mission. Using ANSYS/Fluent I analyzed structural components under significant load cases: launch deployment, thruster firings, and thermal cycling events. Through ANSYS goal driven optimization, I reduced the mass of multiple components while increasing factor of safety under load conditions. I manufactured components inhouse using Cornell's machine shop to develop a testing prototype after designing components in Solidworks CAD. MATLAB scripts utilizing a force sensor DAQ system and thermal vacuum chamber recorded thrust precision and peak magnitude in a vacuum environment filtering out noise and drift.
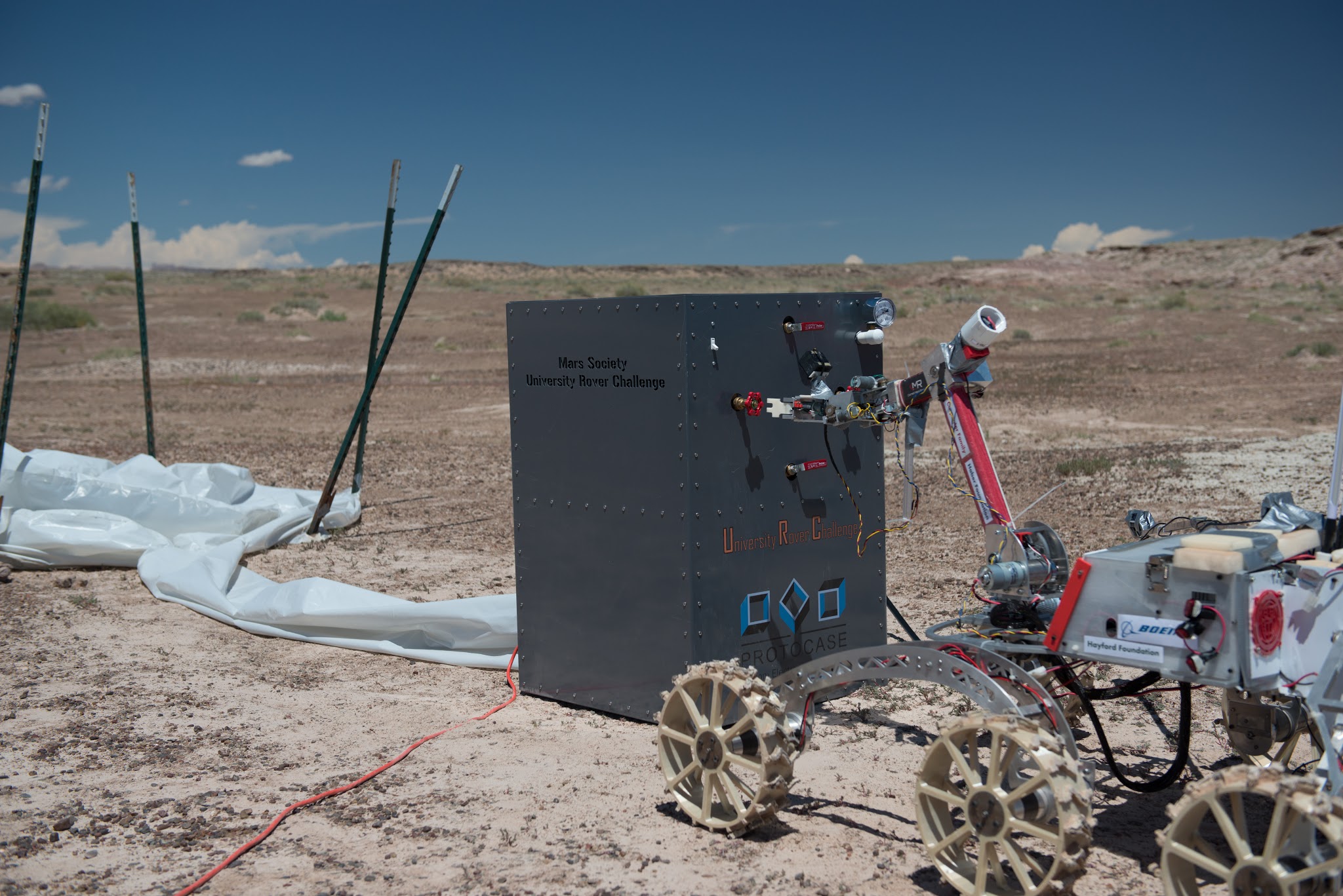
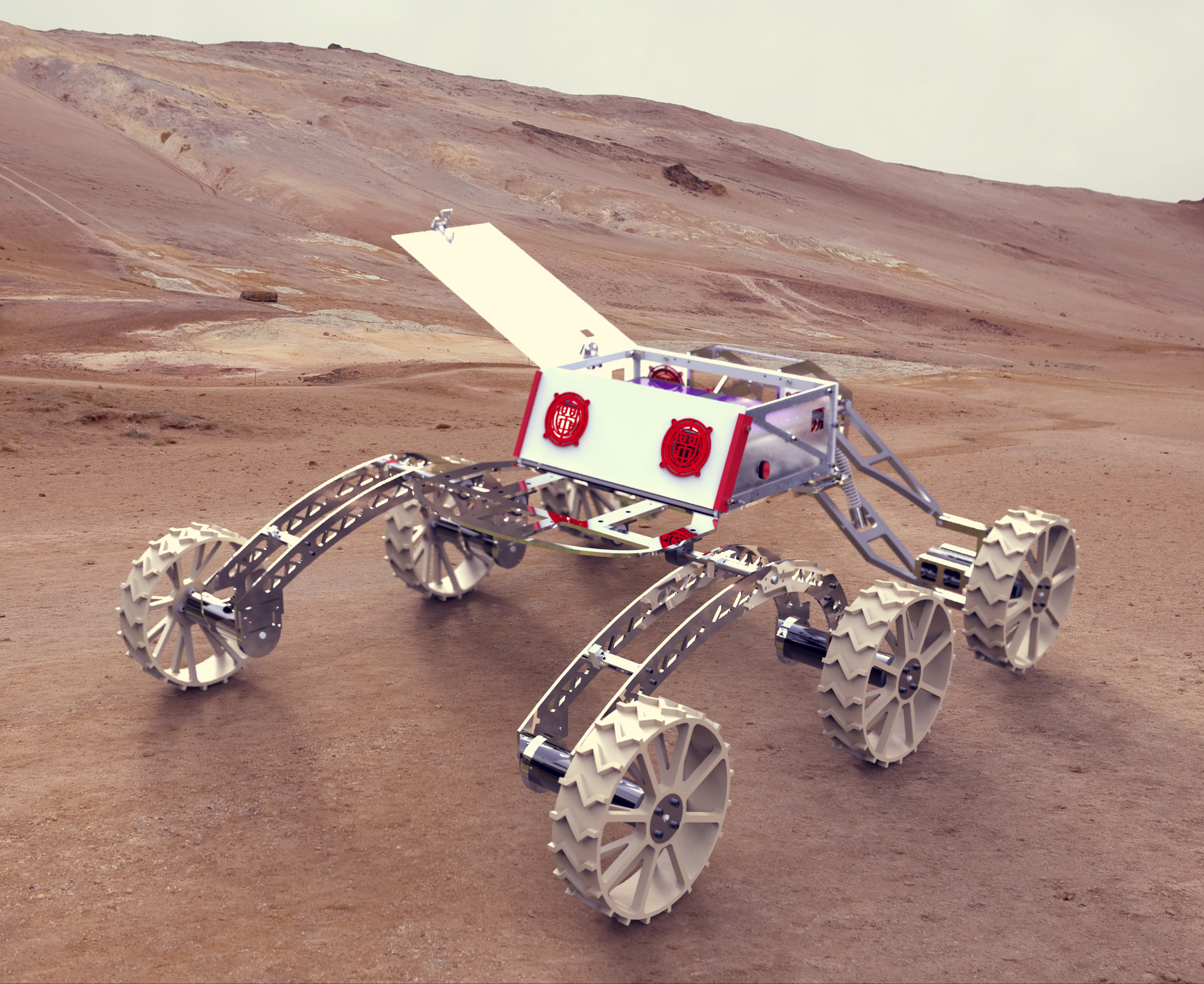
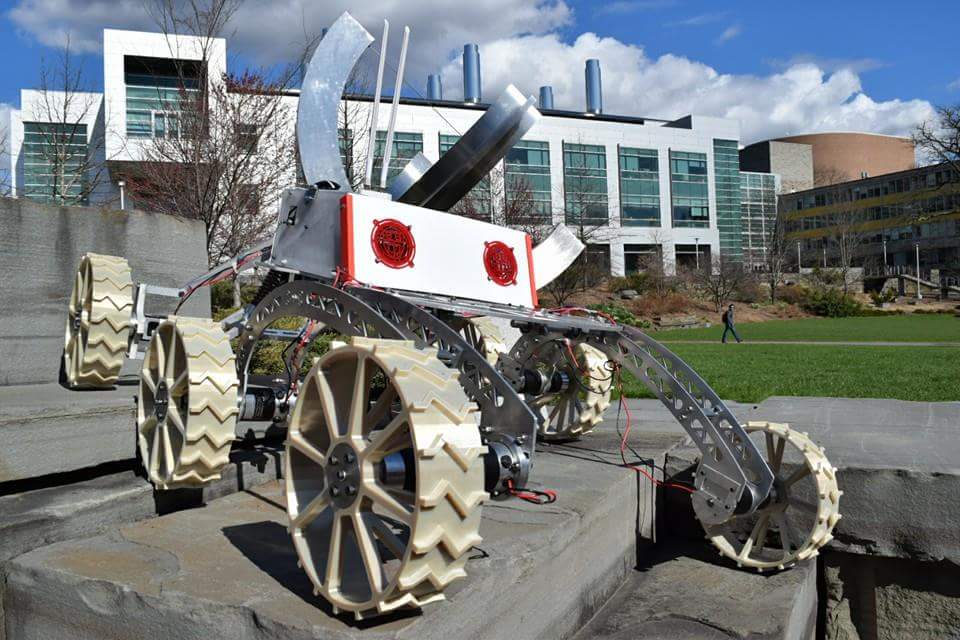
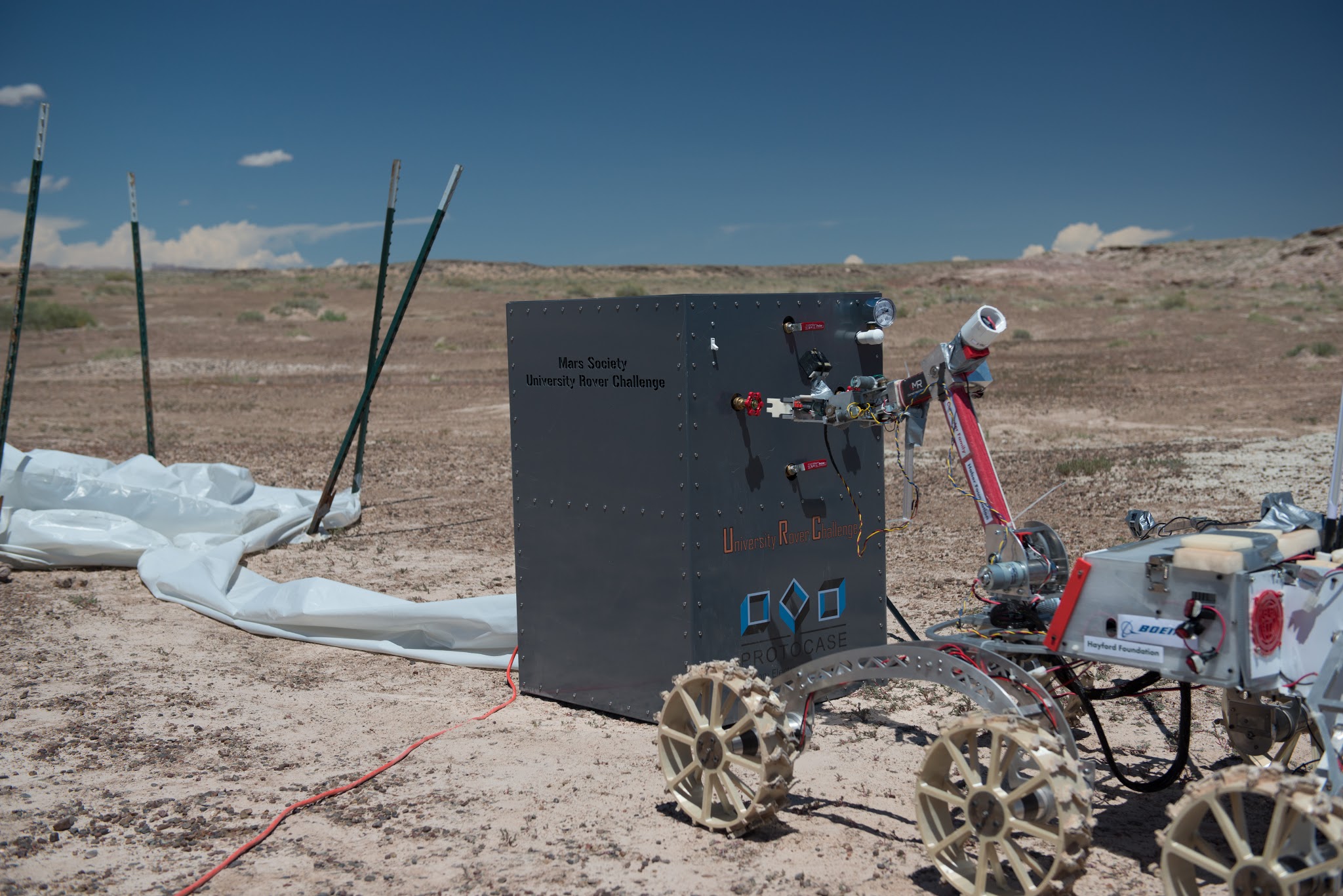
Cornell Mars Rover
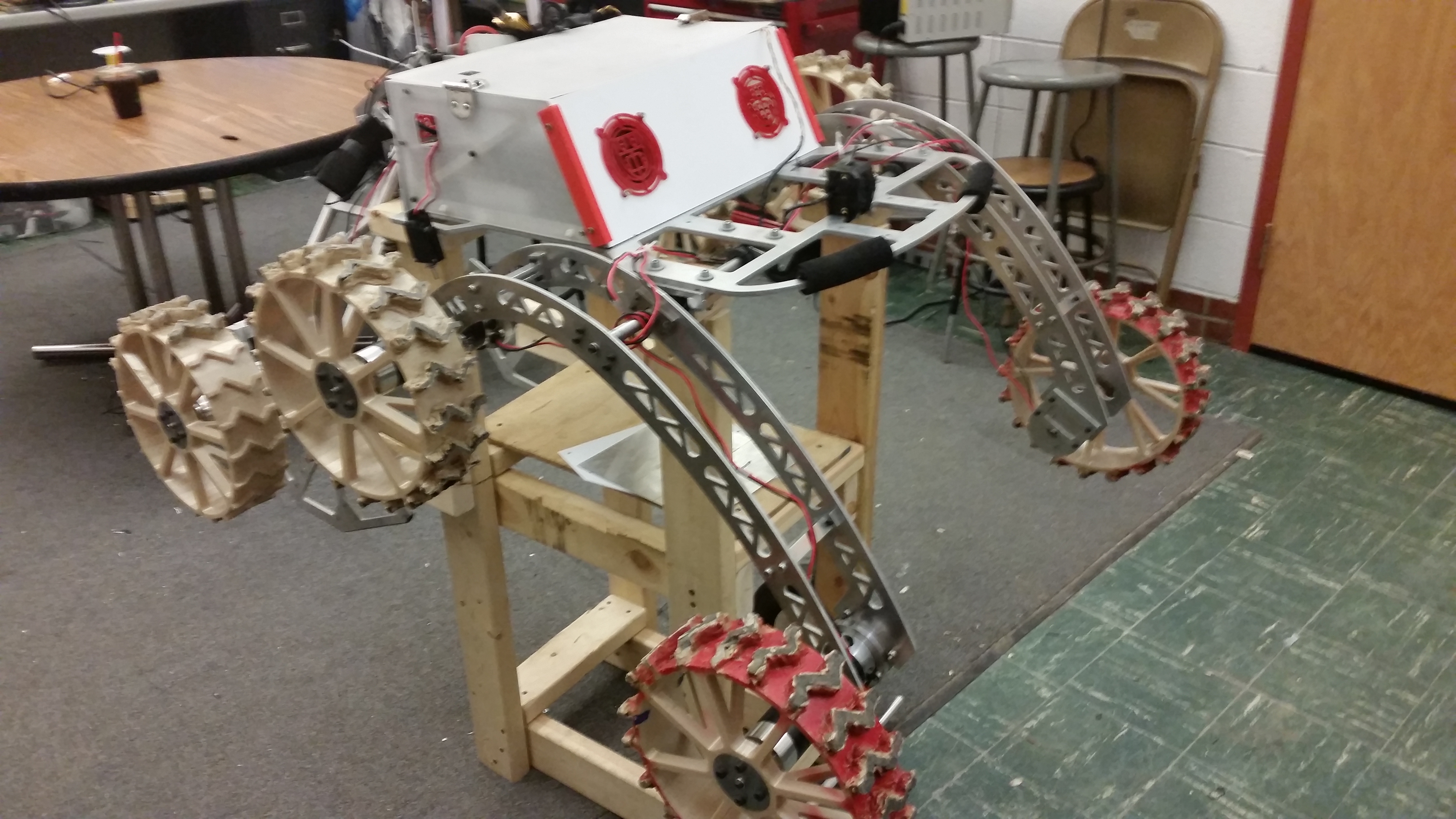
Each year the Cornell Mars Rover team competes in the University Rover Challenge with dozens of teams from around the world. As a mechanical drive team member, I designed, analyzed, machined, and tested the Rocker-Bogie and independent suspension system ensuring the rover was capable of traversing harsh terrain, assisting astronauts with repair and maintenance tasks, and semi-autonomous exploration.
Role: Mechanical Drive Systems Lead Engineer
Mission: The Cornell Mars Rover team competes in the yearly University Rover Challenge at the Mars Desert Research Station.
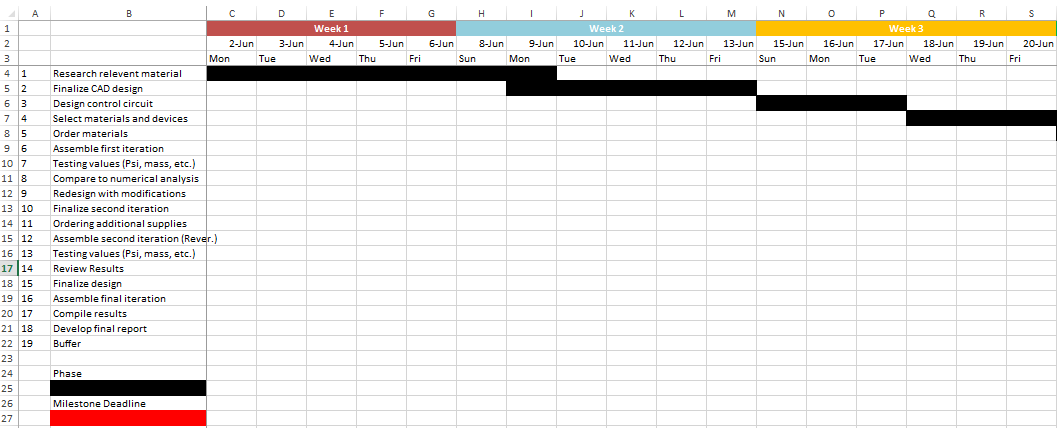
Competing every year in the University Rover Challenge in the Utah Desert, the Cornell Mars Rover team designs, builds, and tests a new rover each year capable of analyzing soil samples for life, using a robotic arm to assist astronauts, and traversing over harsh terrain. As the mechanical drive system engineer, I worked on the Rocker-Bogie suspension system inspired by the Curiosity rover as well as the rear suspension system. I also oversaw all phases of the project from design review to competition testing. The first half of the year, I model mechanical components in Solidworks CAD and analyze structural, dynamic, and thermal properties in MATLAB and ANSYS FEA. The other half I machine all parts ourselves in house using lathes, mills, and 3D printing techniques. After assembly, the rover goes through a rigorous integration and testing schedule meant to emulate Martian environmental conditions and complete astronaut assistance tasks such as analyzing soil samples and repairing outposts. a vacuum environment filtering out noise and drift.





Mechanical/Aerospace Engineering Skills
- Systems Engineering
- Mission Design
- Requirements Analysis
- Trade Studies
- CAD Modeling
- Power, Mass, and Thermal Budgets
- Material Selection
- FEA Studies (Dynamic, Structural, Thermal)
- CFD Analysis (Aerodynamics, Fluids, Propulsion)
- Software and Data Analysis (Python, MATLAB)
- Control Systems Design
- Machining and Fabrication
- Integration and Testing
Programming/Software Languages



%20--%3e%3c!DOCTYPE%20svg%20PUBLIC%20'-//W3C//DTD%20SVG%201.1//EN'%20'http://www.w3.org/Graphics/SVG/1.1/DTD/svg11.dtd'%3e%3csvg%20version='1.1'%20id='Layer_1'%20xmlns='http://www.w3.org/2000/svg'%20xmlns:xlink='http://www.w3.org/1999/xlink'%20x='0px'%20y='0px'%20viewBox='0.6%201067.9%2090.3%20109.1'%20enable-background='new%200.6%201067.9%2090.3%20109.1'%20xml:space='preserve'%3e%3cg%3e%3cpath%20fill='%23EE4C2C'%20d='M77.6,1099.6l-8.1,8.1c13.3,13.3,13.3,34.7,0,47.8c-13.3,13.3-34.7,13.3-47.8,0%20c-13.3-13.3-13.3-34.7,0-47.8l0,0l21.1-21.1l3-3l0,0v-15.9l-31.8,31.8c-17.7,17.7-17.7,46.3,0,64c17.7,17.7,46.3,17.7,63.7,0%20C95.3,1145.8,95.3,1117.4,77.6,1099.6z'/%3e%3ccircle%20fill='%23EE4C2C'%20cx='61.7'%20cy='1091.8'%20r='5.9'/%3e%3c/g%3e%3c/svg%3e)
%20--%3e%3c!DOCTYPE%20svg%20PUBLIC%20'-//W3C//DTD%20SVG%201.1//EN'%20'http://www.w3.org/Graphics/SVG/1.1/DTD/svg11.dtd'%20[%20%3c!ENTITY%20ns_extend%20'http://ns.adobe.com/Extensibility/1.0/'%3e%3c!ENTITY%20ns_ai%20'http://ns.adobe.com/AdobeIllustrator/10.0/'%3e%3c!ENTITY%20ns_graphs%20'http://ns.adobe.com/Graphs/1.0/'%3e%3c!ENTITY%20ns_vars%20'http://ns.adobe.com/Variables/1.0/'%3e%3c!ENTITY%20ns_imrep%20'http://ns.adobe.com/ImageReplacement/1.0/'%3e%3c!ENTITY%20ns_sfw%20'http://ns.adobe.com/SaveForWeb/1.0/'%3e%3c!ENTITY%20ns_custom%20'http://ns.adobe.com/GenericCustomNamespace/1.0/'%3e%3c!ENTITY%20ns_adobe_xpath%20'http://ns.adobe.com/XPath/1.0/'%3e%20]%3e%3csvg%20version='1.1'%20id='Livello_1'%20xmlns:x='&ns_extend;'%20xmlns:i='&ns_ai;'%20xmlns:graph='&ns_graphs;'%20xmlns='http://www.w3.org/2000/svg'%20xmlns:xlink='http://www.w3.org/1999/xlink'%20x='0px'%20y='0px'%20viewBox='0%200%202289.75%202130'%20enable-background='new%200%200%202289.75%202130'%20xml:space='preserve'%3e%3cmetadata%3e%3csfw%20xmlns='&ns_sfw;'%3e%3cslices%3e%3c/slices%3e%3csliceSourceBounds%20bottomLeftOrigin='true'%20height='2130'%20width='2289.75'%20x='-1147.5'%20y='-1041'%3e%3c/sliceSourceBounds%3e%3c/sfw%3e%3c/metadata%3e%3cpath%20fill='%23185C37'%20d='M1437.75,1011.75L532.5,852v1180.393c0,53.907,43.7,97.607,97.607,97.607l0,0h1562.036%20c53.907,0,97.607-43.7,97.607-97.607l0,0V1597.5L1437.75,1011.75z'/%3e%3cpath%20fill='%2321A366'%20d='M1437.75,0H630.107C576.2,0,532.5,43.7,532.5,97.607c0,0,0,0,0,0V532.5l905.25,532.5L1917,1224.75%20L2289.75,1065V532.5L1437.75,0z'/%3e%3cpath%20fill='%23107C41'%20d='M532.5,532.5h905.25V1065H532.5V532.5z'/%3e%3cpath%20opacity='0.1'%20enable-background='new%20'%20d='M1180.393,426H532.5v1331.25h647.893c53.834-0.175,97.432-43.773,97.607-97.607%20V523.607C1277.825,469.773,1234.227,426.175,1180.393,426z'/%3e%3cpath%20opacity='0.2'%20enable-background='new%20'%20d='M1127.143,479.25H532.5V1810.5h594.643%20c53.834-0.175,97.432-43.773,97.607-97.607V576.857C1224.575,523.023,1180.977,479.425,1127.143,479.25z'/%3e%3cpath%20opacity='0.2'%20enable-background='new%20'%20d='M1127.143,479.25H532.5V1704h594.643c53.834-0.175,97.432-43.773,97.607-97.607%20V576.857C1224.575,523.023,1180.977,479.425,1127.143,479.25z'/%3e%3cpath%20opacity='0.2'%20enable-background='new%20'%20d='M1073.893,479.25H532.5V1704h541.393c53.834-0.175,97.432-43.773,97.607-97.607%20V576.857C1171.325,523.023,1127.727,479.425,1073.893,479.25z'/%3e%3clinearGradient%20id='SVGID_1_'%20gradientUnits='userSpaceOnUse'%20x1='203.5132'%20y1='1729.0183'%20x2='967.9868'%20y2='404.9817'%20gradientTransform='matrix(1%200%200%20-1%200%202132)'%3e%3cstop%20offset='0'%20style='stop-color:%2318884F'/%3e%3cstop%20offset='0.5'%20style='stop-color:%23117E43'/%3e%3cstop%20offset='1'%20style='stop-color:%230B6631'/%3e%3c/linearGradient%3e%3cpath%20fill='url(%23SVGID_1_)'%20d='M97.607,479.25h976.285c53.907,0,97.607,43.7,97.607,97.607v976.285%20c0,53.907-43.7,97.607-97.607,97.607H97.607C43.7,1650.75,0,1607.05,0,1553.143V576.857C0,522.95,43.7,479.25,97.607,479.25z'/%3e%3cpath%20fill='%23FFFFFF'%20d='M302.3,1382.264l205.332-318.169L319.5,747.683h151.336l102.666,202.35%20c9.479,19.223,15.975,33.494,19.49,42.919h1.331c6.745-15.336,13.845-30.228,21.3-44.677L725.371,747.79h138.929l-192.925,314.548%20L869.2,1382.263H721.378L602.79,1160.158c-5.586-9.45-10.326-19.376-14.164-29.66h-1.757c-3.474,10.075-8.083,19.722-13.739,28.755%20l-122.102,223.011H302.3z'/%3e%3cpath%20fill='%2333C481'%20d='M2192.143,0H1437.75v532.5h852V97.607C2289.75,43.7,2246.05,0,2192.143,0L2192.143,0z'/%3e%3cpath%20fill='%23107C41'%20d='M1437.75,1065h852v532.5h-852V1065z'/%3e%3c/svg%3e)